
Arduino ile Kırmızı Işıkta Duran araba Yapmak
Arduino trafik projesi, uzaktan kumandalı araba ve trafik setini içerien bir IOT projesidir. Bu projede esp8266 kartı ile wifi üzerinden kontrol edilebilen bir araç geliştirilmiştir. Trafik setinde ise arduino kartı ile trafik ışıklarının kırmızı ve yeşil olarak yanmasını sağlıyoruz. Projedeki kodlar aracın önüne bariyer çıktığında ilerlemesini engelleyecek şekilde ayarlanmıştır.
Arabanın Geliştirilmesi

- Araç parçaları: Tekerlekler ve gövdesi
- 2 adet DC Motor
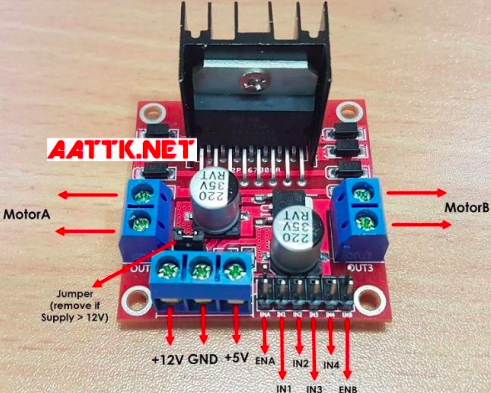
- L298N Motor sürücüsü
- HC-SR04 Ultrasonik mesafe sensörü
- NodeMCU Esp8266 Kart
Araç Malzemeleri

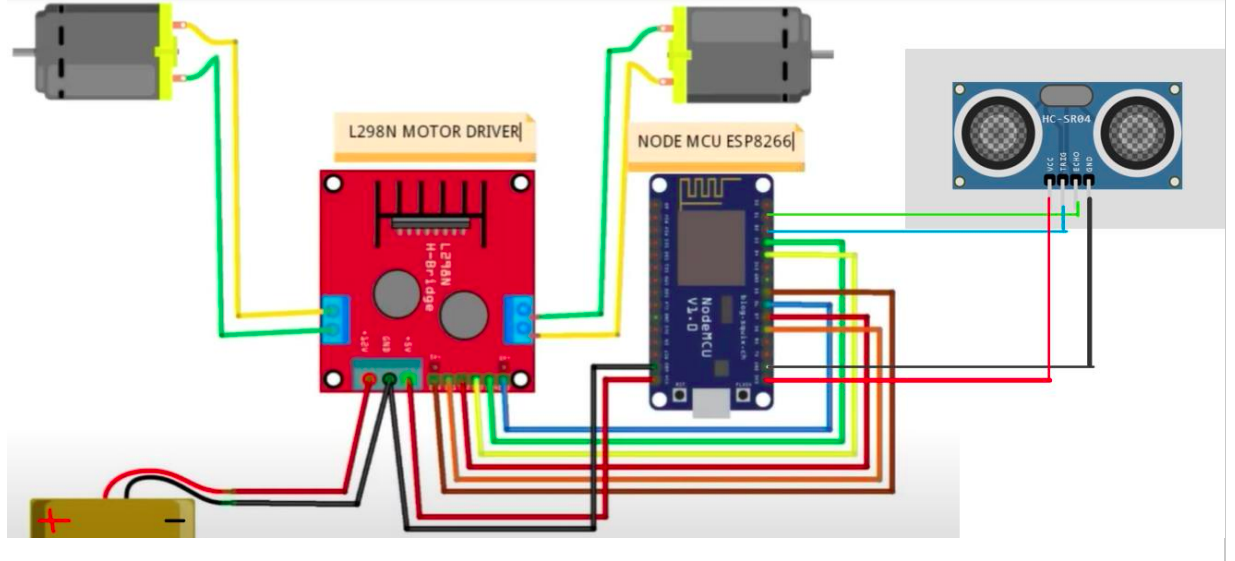
1. Adım: Arabanın monte edilmesi
Aşağıdaki devre şemasına göre arabanın montajını yapabilirsniz.
2. Adım: Apk nın yüklenmesi
Arabayı wifi üzerinden kontrol edeceğimiz apkyı indiriyoruz. Aşağıda verilecek hazır kod ile nodemcu nun kendi wifisinin oluşturulması sağlandı. İndirilen apk ile Nodemcunun yani arabanın wifisine bağlanıp kontrol sağlanacaktır. Apk indirme linki: Apk Linki
3. Adım: Kodlama
Aşağıdaki kodu esp kartınıza yükleyiniz. Esp kartınıza ilk defa yükleme yapıyorsanız Arduino ide üzerinizden öncelikle kartınızı seçmiş olmanız gerekir.
// Motor kontrol pinleri
#define ENA 14 // Sağ motorların hızını kontrol etmek için kullanılan pin (Enable) GPIO14(D5)
#define ENB 12 // Sol motorların hızını kontrol etmek için kullanılan pin (Enable) GPIO12(D6)
#define IN_1 15 // Sağ motorun ileri yönde dönüşünü kontrol etmek için kullanılan pin GPIO15(D8)
#define IN_2 13 // Sağ motorun geri yönde dönüşünü kontrol etmek için kullanılan pin GPIO13(D7)
#define IN_3 2 // Sol motorun ileri yönde dönüşünü kontrol etmek için kullanılan pin GPIO2(D4)
#define IN_4 0 // Sol motorun geri yönde dönüşünü kontrol etmek için kullanılan pin GPIO0(D3)
// Kütüphaneler
#include <ESP8266WiFi.h>
#include <WiFiClient.h>
#include <ESP8266WebServer.h>
// Uygulama komut durumu ve motor hızı değişkenleri
String command; // Uygulama komut durumunu saklamak için kullanılan String.
int speedCar = 800; // Motor hızı (400 - 1023).
int speed_Coeff = 3; // Motor hızı katsayısı.
// Mesafe sensörü pinleri
int trigPin = 4;
int echoPin = 5;
// Mesafe ölçümü için değişkenler
long zaman;
long mesafe;
// WiFi ayarları
const char* ssid = "NodeMCU Car";
ESP8266WebServer server(80);
void setup() {
// Mesafe sensörleri için pin modları ayarlanıyor
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
// Motor pinlerinin modları ayarlanıyor
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(IN_1, OUTPUT);
pinMode(IN_2, OUTPUT);
pinMode(IN_3, OUTPUT);
pinMode(IN_4, OUTPUT);
Serial.begin(115200);
// WiFi bağlantısı yapılıyor
WiFi.mode(WIFI_AP);
WiFi.softAP(ssid);
IPAddress myIP = WiFi.softAPIP();
Serial.print("AP IP address: ");
Serial.println(myIP);
// Web sunucusu başlatılıyor
server.on("/", HTTP_handleRoot);
server.onNotFound(HTTP_handleRoot);
server.begin();
}
void goAhead() {
// İleri git fonksiyonu
digitalWrite(IN_1, LOW);
digitalWrite(IN_2, HIGH);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, HIGH);
analogWrite(ENB, speedCar);
}
void goBack() {
// Geri git fonksiyonu
digitalWrite(IN_1, HIGH);
digitalWrite(IN_2, LOW);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, HIGH);
digitalWrite(IN_4, LOW);
analogWrite(ENB, speedCar);
}
void goRight() {
// Sağa git fonksiyonu
digitalWrite(IN_1, HIGH);
digitalWrite(IN_2, LOW);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, HIGH);
analogWrite(ENB, speedCar);
}
void goLeft() {
// Sola git fonksiyonu
digitalWrite(IN_1, LOW);
digitalWrite(IN_2, HIGH);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, HIGH);
digitalWrite(IN_4, LOW);
analogWrite(ENB, speedCar);
}
void goAheadRight() {
// Sağa çapraz ileri git fonksiyonu
digitalWrite(IN_1, LOW);
digitalWrite(IN_2, HIGH);
analogWrite(ENA, speedCar/speed_Coeff);
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, HIGH);
analogWrite(ENB, speedCar);
}
void goAheadLeft() {
// Sola çapraz ileri git fonksiyonu
digitalWrite(IN_1, LOW);
digitalWrite(IN_2, HIGH);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, HIGH);
analogWrite(ENB, speedCar/speed_Coeff);
}
void goBackRight() {
// Sağa çapraz geri git fonksiyonu
digitalWrite(IN_1, HIGH);
digitalWrite(IN_2, LOW);
analogWrite(ENA, speedCar/speed_Coeff);
digitalWrite(IN_3, HIGH);
digitalWrite(IN_4, LOW);
analogWrite(ENB, speedCar);
}
void goBackLeft() {
// Sola çapraz geri git fonksiyonu
digitalWrite(IN_1, HIGH);
digitalWrite(IN_2, LOW);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, HIGH);
digitalWrite(IN_4, LOW);
analogWrite(ENB, speedCar/speed_Coeff);
}
void stopRobot() {
// Robotu durdur fonksiyonu
digitalWrite(IN_1, LOW);
digitalWrite(IN_2, LOW);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, LOW);
analogWrite(ENB, speedCar);
}
void loop() {
// Web sunucusu istekleri kontrol ediliyor
server.handleClient();
// Mesafe ölçümü yapılıyor
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
zaman = pulseIn(echoPin, HIGH);
mesafe = (zaman / 29.1) / 2;
// Mesafe kontrolü yapılıyor
if (mesafe < 15) {
stopRobot();
} else {
// Uygulama komut durumu kontrol ediliyor
command = server.arg("State");
if (command == "F") goAhead();
else if (command == "B") goBack();
else if (command == "L") goLeft();
else if (command == "R") goRight();
else if (command == "I") goAheadRight();
else if (command == "G") goAheadLeft();
else if (command == "J") goBackRight();
else if (command == "H") goBackLeft();
else if (command == "0") speedCar = 400;
else if (command == "1") speedCar = 470;
else if (command == "2") speedCar = 540;
else if (command == "3") speedCar = 610;
else if (command == "4") speedCar = 680;
else if (command == "5") speedCar = 750;
else if (command == "6") speedCar = 820;
else if (command == "7") speedCar = 890;
else if (command == "8") speedCar = 960;
else if (command == "9") speedCar = 1023;
else if (command == "S") stopRobot();
}
}
void HTTP_handleRoot(void) {
// Web sunucusu kök dizini işleniyor
if (server.hasArg("State")) {
Serial.println(server.arg("State"));
}
server.send(200, "text/html", "");
delay(1);
}Trafik Setinin Geliştirilmesi

Malzemeler
- Karton malzemeler (yolların ve ışık direklerinin yapılması için)
- Bariyerler için iki adet micro servo motor
- Arduino uno
- Trafik ışıkları için ledler
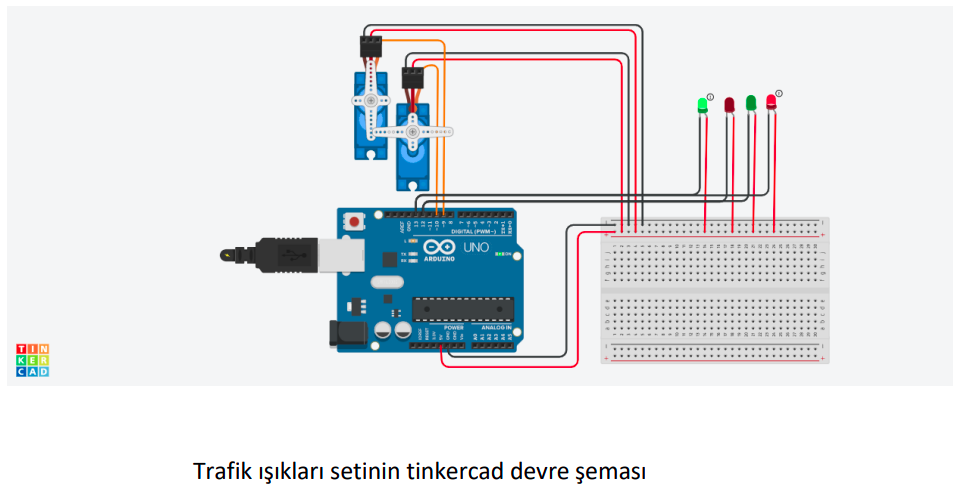
Adım 1: Fiziksel bağlantıların yapılması
Trafik setinin tasarımını yaptıktan sonra bağlatıları aşağıdaki gibi yapın. Servo motorların hareket eden koluna yolu kapatıp açacak bariyerleri bağlayın.

Adım 2: Kodlamanın yapılması
Adruino uno ya yüklenecek gerekli kodlar aşağıdadır.
#include <Servo.h> //import library
Servo myservo;
int led = 13
Servo myservo1;
int led1 = 12;
void setup()
{
pinMode(led, OUTPUT);
myservo.attach(9, 500, 2500);
pinMode(led1, OUTPUT);
myservo1.attach(10, 500, 2500);
}
void loop()
{
// Rotate Servo 3 by 180 degree
myservo.write(90);
myservo1.write(0);
delay(10);
digitalWrite(led, HIGH);
delay(8000);
digitalWrite(led, LOW);
myservo.write(0);
myservo1.write(0);
delay(1000);
myservo.write(0);
myservo1.write(90);
delay(10);
digitalWrite(led1, HIGH);
delay(8000);
digitalWrite(led1, LOW);
myservo.write(0);
myservo1.write(0);
delay(1000);
}